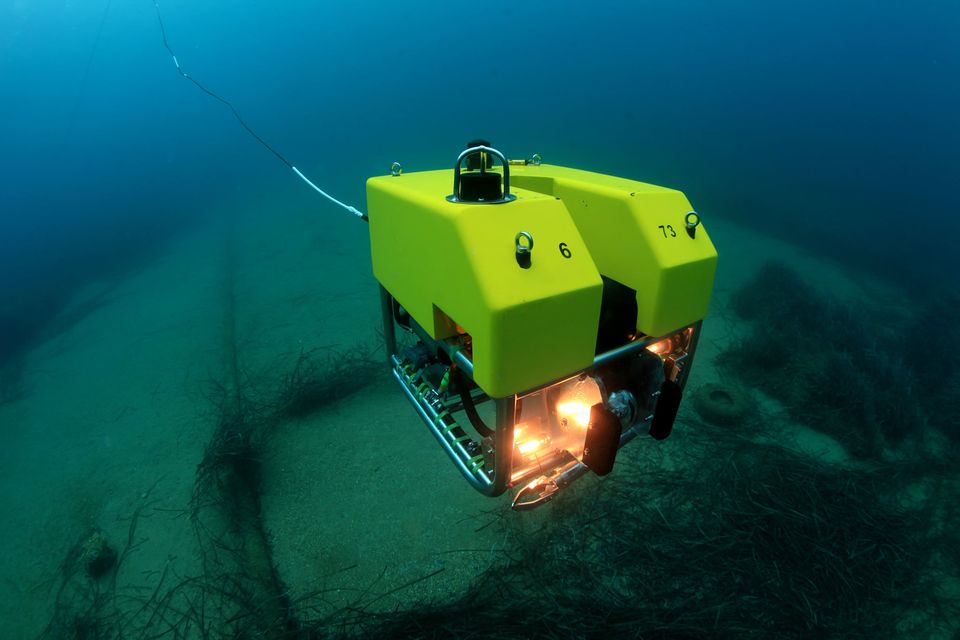
A remotely operated underwater vehicle (technically ROUV but commonly just ROV) is a tethered underwater mobile device.
ROVs are unoccupied, usually highly maneuverable, and operated by a crew either aboard a vessel/floating platform or on proximate land. They are common in deepwater industries such as offshore hydrocarbon extraction. They are linked to a host ship by a neutrally buoyant tether or, often when working in rough conditions or in deeper water, a load-carrying umbilical cable is used along with a tether management system (TMS).
The TMS is either a garage-like device which contains the ROV during lowering through the splash zone or, on larger work-class ROVs, a separate assembly which sits on top of the ROV. The purpose of the TMS is to lengthen and shorten the tether so the effect of cable drag where there are underwater currents is minimized. The umbilical cable is an armored cable that contains a group of electrical conductors and fiber optics that carry electric power, video, and data signals between the operator and the TMS.
Where used, the TMS then relays the signals and power for the ROV down the tether cable. Once at the ROV, the electric power is distributed between the components of the ROV. However, in high-power applications, most of the electric power drives a high-power electric motor which drives a hydraulic pump. The pump is then used for propulsion and to power equipment such as torque tools and manipulator arms where electric motors would be too difficult to implement subsea.
Most ROVs are equipped with at least a video camera and lights. Additional equipment is commonly added to expand the vehicle’s capabilities. These may include sonars, magnetometers, a still camera, a manipulator or cutting arm, water samplers, and instruments that measure water clarity, water temperature, water density, sound velocity, light penetration, and temperature.
Comments are closed